
Hjem / Nyheder / Industri -nyheder / Hvilke motorer bruges i AGV-systemer, og hvordan vælger du den rigtige AGV-drivmotor?

 sprog
sprog
Applikationsindustri
AGV
Automatiske robotter

Laserskæring

Logistik -sortering

Fotovoltaisk magtstation

Medicinsk udstyr
Hvilke motorer bruges i AGV-systemer, og hvordan vælger du den rigtige AGV-drivmotor?
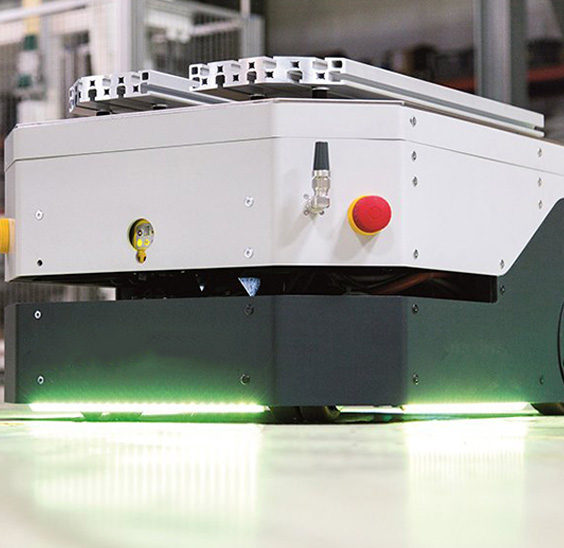
Drivmotoren er den mest kritiske elektromekaniske komponent i et Autonomous Guided Vehicle (AGV). Det bestemmer, hvordan AGV'en accelererer, hvor præcist den placerer sig, hvor meget nyttelast den kan flytte, hvor længe dens batteri holder mellem opladningerne, og hvor længe køretøjet kører, før drivsystemet kræver vedligeholdelse. En AGV med en undermotoriseret eller forkert specificeret drivmotor kan ikke opfylde kravene til nyttelast og hastighed i produktionen; en med dårlig motoreffektivitet dræner batteriet hurtigere, end logistikdriften kan rumme; en med en drivmotor, der kræver hyppig vedligeholdelse, skaber uplanlagt nedetid i et system, hvis hele værdien er pålidelig, kontinuerlig autonom drift.
For AGV-systemintegratorer er robotingeniører, der specificerer drivkomponenter, lagerautomatiseringsteam, der evaluerer AGV-platforme, og OEM-udstyrsudviklere, der designer nye AGV-køretøjer, forstår de motorteknologier, der bruges i AGV-drivsystemer - og de specifikationsparametre, der bestemmer, hvilken teknologi der passer til hvilken applikation - væsentlig viden for at træffe de rigtige komponentbeslutninger. Denne vejledning dækker AGV-drivmotortyper, valgparametre og de specifikke krav, der adskiller AGV-motorapplikationer fra generelle industrimotorapplikationer.
Hvorfor AGV-drevmotorkrav er forskellige fra generelle industrielle motorkrav
AGV-drivmotorer fungerer under et krævende og karakteristisk sæt forhold, der adskiller dem fra de fleste generelle industrielle motorapplikationer:
Batteri strømforsyning. Alle AGV'er er batteridrevne - de fungerer fra en DC-batteripakke (typisk 24V, 36V eller 48V nominel) uden tilslutning til lysnettet. Dette kræver grundlæggende DC-kompatible drivmotorer. AC-motorer kan bruges med indbyggede invertere, men effektivitetsstraffen ved DC-til-AC-inversion i et batteridrevet system er betydelig. DC-motorer - og især BLDC-motorer - er det dominerende valg, fordi de accepterer batteristrøm direkte (eller gennem en DC-DC-konverter) uden inversionsstraffen.
Hyppige start-stop-cyklusser. AGV'er accelererer fra hvile- til rejsehastighed, navigerer til et pick- eller deponeringspunkt og stopper - gentagne gange, hundreder eller tusindvis af gange om dagen. Drivmotoren skal klare denne start-stop-cyklus uden at overophedes eller slides for meget, hvilket stiller krav til motorens termiske styring og, for børstede motorer, kommutator- og børstesamlingen, der håndterer de højstrøms starttransienter.
Tovejsdrift. AGV'er skal køre både frem og tilbage - og skal skifte mellem retninger rent uden mekanisk stød. Motoren og dens styreenhed skal understøtte jævn tovejshastighedskontrol. For rat-differentiale AGV'er (hvor uafhængig hjulhastighedskontrol til venstre og højre skaber drejninger), skal de to drivmotorer matches præcist i deres hastighed-drejningsmomentrespons for præcis styring.
Præcis hastigheds- og positionskontrol. Navigationsnøjagtighed i moderne AGV'er - især laserstyrede (LiDAR), vision-guidede eller magnetiske spor-AGV'er - kræver præcis hastighedskontrol og, i nogle systemer, præcis positionsfeedback fra drivmotorens indkoder. Motoren skal køre med ensartede, kontrollerede hastigheder på tværs af dens nyttelast og terrænområde uden hastighedsjagt eller ustabilitet.
Høj effektivitet for batterilevetid. I et batteridrevet autonomt køretøj bestemmer motorens effektivitet direkte driftstiden mellem opladninger. Et drivmotorsystem, der kører med 85 % effektivitet i stedet for 75 %, udvider køretøjets driftsområde med ca. 13 %, hvilket i en logistikapplikation kan være forskellen mellem et køretøj, der fuldfører sin rute inden for en battericyklus, og kræver et uplanlagt opladningsstop. Energieffektivitet er et førsteklasses specifikationskrav i AGV-motorvalg, ikke en sekundær overvejelse.
De vigtigste motortyper, der bruges i AGV-drivsystemer
Børsteløse DC-gearmotorer (BLDC): Den dominerende AGV-drivteknologi
Børsteløse DC-gearmotorer er den overvældende foretrukne drivmotorteknologi til moderne AGV-systemer. BLDC-motoren erstatter den mekaniske kommutator- og børstesamling af en traditionel børstet jævnstrømsmotor med elektronisk kommutering - en motorcontroller læser rotorpositionen (via Hall-effektsensorer eller encoderfeedback) og skifter statorviklingerne i den korrekte rækkefølge for at opretholde rotation uden nogen fysisk børstekontakt. Denne elektroniske kommutering er det, der giver BLDC-motorer deres afgørende fordele i forhold til børstede motorer i AGV-sammenhæng:
Ingen børsteslid = ingen børstevedligeholdelse. I en børstet jævnstrømsmotor slides kulbørsterne, der presser mod kommutatorringene, konstant under drift. Ved høje arbejdscyklusser - AGV'er, der kører 20 timer om dagen i tre-skifts logistikoperationer - kan intervaller for børsteudskiftning nås inden for måneder, hvilket kræver planlagt nedetid og udskiftningsarbejde. BLDC-motorer har ingen børster at bære; de eneste slidkomponenter er motorlejerne, som har levetid målt i tusindvis af timer. For en AGV-flåde, der kører kontinuerligt, er eliminering af børstevedligeholdelse en høj driftsomkostning og oppetidsfordel.
Højere effektivitet. BLDC-motorer opnår typisk 90–95 % elektrisk-til-mekanisk effektivitet ved deres nominelle driftspunkt sammenlignet med 75–85 % for tilsvarende børstede DC-motorer. I en batteridrevet AGV oversættes denne effektivitetsforskel direkte til mere arbejdstid pr. ladecyklus.
Bedre termisk ydeevne. BLDC motorvarme genereres primært i statorviklingerne, som er i direkte kontakt med motorhuset, hvilket gør varmeafledningen effektiv. Børstede motorer genererer varme ved både viklingerne og kommutator/børstekontaktpunktet, og børstekontaktpunktet er i det indre af motoren, hvor varmeafledningen er mindre effektiv. BLDC-motorer opretholder højere kontinuerlige driftscyklusser uden overophedning.
Præcis hastighedskontrol. Elektronisk kommutering med encoder eller Hall-sensorfeedback muliggør tæt hastighedskontrol med lukket sløjfe over et bredt driftsområde. AGV-navigationsalgoritmer er afhængige af nøjagtig hjulhastighedsfeedback til dødregnings-estimering af position mellem absolutte positionsbestemmelser — BLDC-motorer med encoderfeedback leverer denne nøjagtighed pålideligt.
Børstede DC-gearmotorer: Omkostningseffektive til AGV-applikationer med lavere belastning
Børstede DC-gearmotorer forbliver i brug i AGV-applikationer, hvor driftscyklussen er lavere (ikke kontinuerlig 24/7-drift), hvor nyttelastkravene er beskedne, og hvor de lavere motoromkostninger er en prioritet i omkostningsfølsomme AGV-platforme. I AGV'er designet til let intern logistik - transport af små dele, dokumentlevering, let produktionslinjeunderstøttelse - kan den enklere styreelektronik, der kræves af børstede jævnstrømsmotorer (ingen kommuteringscontroller nødvendig) og deres lavere enhedsomkostninger retfærdiggøre deres valg over BLDC-alternativer på trods af kravet om børstevedligeholdelse.
Børstede DC-motorer giver også et meget højt startmoment - højere end en tilsvarende størrelse BLDC-motor i nogle designs - hvilket kan være nyttigt for AGV'er, der starter under belastning på skråninger. Imidlertid kan moderne BLDC-motorcontrollere replikere denne høje startmomentadfærd gennem feltorienterede kontrolstrategier, hvilket reducerer den børstede motors historiske fordel på dette område.
Planetgearmotorer til AGV-drivhjul
Uanset om motorelementet er børstet eller børsteløst DC, anvender AGV drivhjul næsten universelt planetgearreduktion mellem motor og hjul. Planetgearkonfigurationen er den foretrukne gearkassetype til AGV-applikationer af flere årsager:
Planetgear giver den højeste momenttæthed - det højeste udgangsmoment for en given gearkasses ydre diameter - hvilket er kritisk i AGV-hjulsamlinger, hvor den komplette motor-gearkasse-hjulenhed skal passe inden for snævre dimensionelle begrænsninger på køretøjets chassis. Den koaksiale input/output-justering af en planetgearkasse muliggør en kompakt inline-samling: motor → planetgearkasse → drivhjul, alt sammen på en enkelt akse, uden forskydningen skabt af et cylindrisk tandhjul eller snekkegearreduktion.
Planetgearkasser giver også høj effektivitet (92–97 % pr. trin) sammenlignet med snekkegearalternativer (typisk 50–85 % afhængigt af forholdet og forspringsvinkel), hvilket er vigtigt i den batterieffektivitetskritiske AGV-applikation. En AGV-drevmotor med snekkegear, der kører med 70 % gearkasseeffektivitet, mister 30 % af motorens elektriske energitilførsel til varme i gearkassen alene - en uacceptabel straf for et batteridrevet køretøj.
Nøglespecifikationsparametre for valg af AGV-drevmotor
| Parameter | Typisk AGV-specifikationsområde | Hvorfor det betyder noget |
|---|---|---|
| Nominel spænding | 24V / 36V / 48V DC | Skal matche AGV-batteripakkens spænding; højere spænding tillader højere effekt ved lavere strøm, hvilket reducerer kabeltab og motortemperatur |
| Nominel effekt | 50W – 1.000W pr. drivmotor (afhængig af køretøj og nyttelast) | Skal være tilstrækkelig til at accelerere det lastede køretøj på den stejleste stigning i driftsmiljøet; understrøm forårsager termisk overbelastning af motoren på skråninger |
| Udgangshastighed ved rattet | 50–300 RPM (hjulaksel, efter gearreduktion) | Bestemmer køretøjets rejsehastighed; hjuldiameter og mål-AGV-hastighed definerer det nødvendige omdrejningstal for udgangsaksel og derfor det nødvendige gearforhold |
| Kontinuerligt udgangsmoment | 5–200 Nm pr. drivmotor (afhængig af nyttelast og hældning) | Skal overstige det drejningsmoment, der kræves for at flytte den fuldt belastede AGV på den maksimale stigning ved den nominelle hastighed; Anvend 2× sikkerhedsfaktor for stødbelastningsmargen |
| Topdrejningsmoment | 2×–3× kontinuerligt drejningsmoment | Nødvendig for acceleration fra stilstand under fuld belastning; motor og styreenhed skal opretholde maksimalt drejningsmoment i hele accelerationsrampens varighed uden overophedning eller udløsning af overstrømsbeskyttelse |
| Encoder opløsning | 100–4096 PPR (impulser pr. omdrejning ved motoraksel) | Bestemmer odometriens nøjagtighed for dødregningsnavigation; højere encoder-opløsning forbedrer positionsestimat mellem absolutte positionsbestemmelser fra navigationssensorer |
| Effektivitet | ≥ 85 % samlet (motorgearkasse) ved det nominelle driftspunkt | Bestemmer direkte batteridriftstid; BLDC planetary opnår 90% kombineret effektivitet; foretrækker dette frem for børstet snekkegear (60-70 % kombineret) |
| IP rating | IP54 minimum for generel indendørs logistik; IP65 til våde eller støvede miljøer | AGV-motorer udsættes for forurenende stoffer på gulvniveau; utilstrækkelig beskyttelse mod indtrængning fører til for tidlig leje- og viklingsfejl fra støv og fugt |
| Arbejdscyklus | S1 kontinuerlig til 24/7 drift; S3 intermitterende til enkeltskift | Motorens termiske klassificering skal svare til driftsmønsteret; en motor, der er klassificeret til S3 intermitterende drift, vil overophedes i kontinuerlige S1 AGV-applikationer |
Sådan beregnes det påkrævede AGV-drevmotormoment
Det drejningsmoment, der kræves for at drive en AGV ved konstant hastighed på en flad overflade, skal overvinde rullemodstanden; på en skråning tilføjer tyngdekraften en gradmodstandskomponent. Beregningen for en typisk to-drevet AGV:
Køretøjets samlede vægt: W = (AGV egenvægt maksimal nyttelast) × g [Newtons]
Rullemodstandskraft: F_rolling = W × μ_r, hvor μ_r er rullemodstandskoefficienten (typisk 0,01-0,02 for gummihjul på glat beton; 0,02-0,05 for bløde gulve eller ru overflader)
Grademodstandskraft (til hældninger): F_grade = W × sin(θ), hvor θ er stigningsvinklen (for en 5 % stigning, θ ≈ 2,86°, sin(θ) ≈ 0,05)
Samlet drivkraft: F_total = F_rolling F_grade
Nødvendigt drejningsmoment ved drivhjulet (pr. motor, forudsat to drivmotorer): T_wheel = (F_total / 2) × r_wheel, hvor r_wheel er drivhjulets radius i meter
Nødvendigt motormoment: T_motor = T_wheel / (i × η), hvor i er gearreduktionsforholdet, og η er gearkasseeffektiviteten
For eksempel en AGV med 500 kg total lastvægt, 150 mm diameter drivhjul, på en 3 % grad, med en 25:1 planetgearkasse ved 0,95 effektivitet:
- B = 500 × 9,81 = 4.905 N
- F_rolling = 4.905 × 0,015 = 73,6 N
- F_grade = 4.905 × 0,03 = 147,2 N
- F_total = 220,8 N; pr. motor = 110,4 N
- T_wheel = 110,4 × 0,075 = 8,28 Nm
- T_motor = 8,28 / (25 × 0,95) = 0,35 Nm nominelt kontinuerligt drejningsmoment
Tilføj 2× sikkerhedsfaktor for accelerationsmoment: maksimalt motormomentkrav ≈ 0,70 Nm. En BLDC planetgearmotor med ≥ 0,70 Nm spidsmoment ved 48V med et forhold på 25:1 opfylder dette krav. Det kontinuerlige drejningsmoment skal verificeres i forhold til det kontinuerlige krævede drejningsmoment (0,35 Nm ved fuld nyttelast på hældning) med tilstrækkelig termisk margin.
Ofte stillede spørgsmål
Hvordan påvirker styringskonfigurationen af en AGV motorvalg?
AGV'er bruger flere styrekonfigurationer, hver med forskellige motorkrav. Differentialdrevet (to uafhængige drivhjul, intet rat) skaber sving ved at køre de to drivmotorer ved forskellige hastigheder - dette kræver, at begge motorer er nøje afstemt i deres hastighed-drejningsmoment-karakteristika og kontrolleres af en koordineret motorfører, der kan styre differentialhastighed på begge hjul samtidigt. Trehjulet styring (et styret drivhjul foran, to passive baghjul) bruger en enkelt drivmotor med en separat styreaktuator - motorvalg er ligetil, men integration af styreaktuator skal overvejes. Omnidirektionelle drev (mecanum eller omni-hjul i hvert hjørne) bruger fire individuelt kontrollerede motorer og tillader sideværts og diagonal bevægelse - motorcontrollere skal håndtere fire-kanals koordination, og motorerne skal have fremragende hastighedstilpasningsegenskaber på tværs af deres driftsområde.
Hvilken encodertype anbefales til AGV-drivmotorer?
Inkrementelle indkodere (kvadratur A/B-udgang) er den mest almindelige type til AGV-drevmotorodometri — de giver det pulstal pr. omdrejning, som navigationscontrolleren konverterer til tilbagelagt hjulafstand og hastighed. Absolutte encodere bruges lejlighedsvis i applikationer, der kræver, at controlleren kender positionen uden målsøgning efter tænding, men til odometri (afstandsmåling) er inkrementelle encodere standard. Opløsning på 500–1000 PPR ved motorakslen er typisk tilstrækkelig til en god afstandsmålingsnøjagtighed med standard planetgearsreduktionsforhold. Højere opløsning (2000–4096 PPR) forbedrer afstandsmåling på systemer med lavt forhold, hvor hjulakslen bevæger sig en større brøkdel af en omdrejning pr. motoromdrejning.
Kan AGV-drivmotorer bruges med regenerativ bremsning?
Ja — BLDC-motorcontrollere i AGV-applikationer understøtter typisk regenerativ bremsning, hvor motoren fungerer som en generator under deceleration og omdanner kinetisk energi tilbage til elektrisk energi, der genoplader batteriet. Regenerativ bremsning reducerer batteriforbruget (især i stop-and-go AGV-ruter med hyppige decelerationshændelser), reducerer bremseslid og muliggør hurtigere deceleration uden mekanisk bremsevarme. Energigenvindingseffektiviteten ved regenerativ bremsning i en typisk AGV-applikation er 15-30 % af den energi, der bruges til acceleration, hvilket er meningsfuldt ved højfrekvente kortruteoperationer. Regenerativ kapacitet kræver, at motorstyringen understøtter tovejs strømflow, og at batteristyringssystemet accepterer regenereret ladestrøm uden at gå i overspændingsbeskyttelse.
AGV drivmotorer fra Zhejiang Saiya Intelligent Manufacturing
Zhejiang Saiya Intelligent Manufacturing Co., Ltd. , Deqing, Zhejiang, fremstiller BLDC-planetgearmotorer, børstede DC-planetgearmotorer og komplette AGV-drivmotorsamlinger til autonome vejledte køretøjsapplikationer. AGV-produktsortimentet dækker drivmotorenheder med integrerede indkodere ved 24V, 36V og 48V nominelle batterispændinger, i rammestørrelser fra 32 mm til 82 mm i diameter, med planetgear-reduktionsforhold fra 5:1 til over 500:1, der dækker nyttelastklasser fra lette, lette transporter af små dele til transport af AGV'er til tunge platforme. Brugerdefinerede AGV-motorspecifikationer - spænding, forhold, koderopløsning, montering, IP-klassificering og stik - er tilgængelige gennem virksomhedens OEM/ODM-udviklingsservice.
Kontakt os med dine AGV-specifikationer - køretøjsvægt, nyttelast, maksimal hastighed, batterispænding, hjuldiameter og driftsmiljø - for at modtage en anbefaling og et tilbud på drivmotoren.
Relaterede produkter: AGV projektprodukter | Børsteløse DC gearmotorer | Planetgearmotorer | Precision planetgearkasse | Børstede DC-gearmotorer
Relaterede produkter
-

Denne 6W-induktions-AC-gearmotor er en effektiv, kompakt og pålidelig lille motor, der er egnet til en lang række industrielle og husholdningsapplikationer. Det kan bruges i spændinger, der spænder...
Se detaljer -

6W børste DC Gbear -motor er designet til effektivitet og alsidighed, der er egnet til forskellige applikationer. Med en kompakt rammestørrelse på 60 mm x 60 mm passer den problemfrit ind i stramme...
Se detaljer -

10W Brush DC Gear Motor tilbyder høj ydeevne og tilpasningsevne til en række industrielle og hobbyistiske applikationer. Med en rammestørrelse på 60 mm x 60 mm er denne motor designet til at passe ...
Se detaljer -

Den 24V børsteløse gearmotor er en alsidig og effektiv motor designet til en række applikationer. Med dimensioner, der spænder fra 60 mm x 60 mm til 104 mm x 104 mm, kan denne motor passe ind i for...
Se detaljer -

Den 32 mm børstede planetariske gearmotor er en kompakt og effektiv løsning designet til forskellige applikationer, der kræver højt drejningsmoment og præcis kontrol. Med en diameter på 32 mm er de...
Se detaljer -

Den 42 mm børsteplanetariske gearmotor er en alsidig og effektiv komponent, der er vidt brugt i forskellige applikationer, der kræver præcist drejningsmoment og hastighedskontrol. Med en nominel st...
Se detaljer -

Den 32 mm børsteløse planetariske gearmotor er en højtydende, kompakt løsning, der er ideel til applikationer, der kræver effektivitet og pålidelighed. Betjening med en nominel spænding på 24V og f...
Se detaljer -

Den 42 mm børsteløse planetariske motor er et højeffektivt motorprodukt, der er vidt brugt i forskellige scenarier, der kræver præcisionstransmission. Den nominelle strøm af denne motor er 1,3A, og...
Se detaljer -

SPE -serien gearkasser, flangestørrelsesområde med 40, 60, 80, 120 og 160 modeller, er designet til at levere effektive og robuste kraftoverførselsløsninger. Disse gearkasser har en rund udgangsfla...
Se detaljer -

SPF -serien er med firkantede outputflanger, der imødekommer dimensioner fra 40 mm til 160 mm. Disse flanger er konstrueret til at udmærke sig i forskellige industrielle applikationer og tilbyder p...
Se detaljer -

Den 52 mm børstede planetariske gearmotor er en kompakt og effektiv løsning designet til forskellige applikationer, der kræver højt drejningsmoment og præcis kontrol. Med en diameter på 52 mm er de...
Se detaljer -

Den 62 mm børsteplanetariske gearmotor er en alsidig og effektiv komponent, der er vidt brugt i forskellige applikationer, der kræver præcist drejningsmoment og hastighedskontrol. Med en nominel st...
Se detaljer
Kontaktoplysninger
- TEL: 0086-0571-86951513/86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / [email protected] / [email protected]
- Kontor: Hangzhou Saiya Transmisson Equipment Co., Ltd
- Office Address: Værelse 2201, Wanyin Building, Hangzhou City, Zhejiang -provinsen
- Fabrik: Zhejiang Saiya Intelligent Manufacturing Co., Ltd.
- Factory Address: No.35 Building, Zhongnan High-Tech Yunhe Zhigu Industrial Park, Xinan Town, Deqing County, Huzhou City, Zhejiang, Kina
Hurtigt link
PRODUKT
Hvis du er interesseret
I vores produkter,
Kontakt os
Copyright © Zhejiang Saiya Intelligent Manufacturing Co., Ltd. All Rights Reserved.
Brugerdefinerede gearreduktionsmotorer leverandører
